人工智能(AI)的進步開啟了自動化機器人技術的新紀元,使機器人能夠適應復雜多變的環境。
過去幾十年間,機器人技術雖取得顯著進展,但仍面臨潛力未完全釋放的挑戰。傳統機器人通常依賴預設指令和固定配置,難以應對突發狀況。而融合了認知、分析、推理與決策能力的AI技術,正賦予機器人智能化操作能力,大幅提升其輔助人類的效能。
通過將AI技術融入機器人工程系統,我們有望在工業、農業、物流、醫療等領域實現更廣泛的應用,使機器人能以更高自主性和效率完成復雜任務。這種技術升級不僅釋放了機器人在現實場景的應用潛力,為醫療和環境問題提供解決方案,更推動工業4.0時代的智能制造范式轉型。
AI驅動的創新機器人系統
在香港理工大學機械工程系智能機器人及自動化講座教授、理大-南京科技創新研究院院長張丹教授的帶領下,研究團隊利用AI技術開發出多款高性能動態機器人系統。
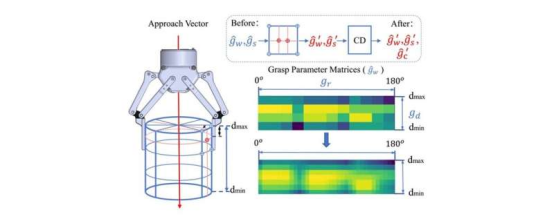
該團隊最新提出的抓取姿態檢測框架,采用深度神經網絡生成六自由度(6-DoF)全向高精度抓取方案。通過卷積神經網絡(CNN)對多尺度圓柱體進行物體檢測,精確獲取目標物體的幾何信息與尺寸定位。
多層感知機(MLP)集群協同優化機械臂抓取參數,包括夾爪寬度、抓取評分(針對特定平面旋轉角度與夾爪深度)及碰撞檢測。這些參數輸入框架算法后,可將預設抓取配置擴展為適應場景的完整抓取方案。實驗數據顯示,該方法在實驗室模擬中的平均成功率達84.46%,優于基準方法的78.31%。
智能康復外骨骼突破
研究團隊還將AI技術應用于膝關節康復外骨骼的創新設計。該外骨骼包含電動驅動的主動屈伸機構、承重踝關節以及剛度調節裝置。通過長短期記憶網絡(LSTM)處理肌電信號與膝關節運動數據,實現符合人體生物力學特性的實時非線性剛度與扭矩調節。
基于徑向基函數(RBF)網絡的自適應控制算法,使外骨骼無需力/扭矩傳感器即可自動調節關節角度與剛度參數,顯著提升位置控制精度與步態適應性。實驗證明,這種數據驅動方法在準確性和實時響應上均優于傳統固定控制模式,能為不同步行速度用戶生成理想關節軌跡。
技術融合的未來前景
張丹教授團隊的研究表明,深度學習等AI技術顯著提升了機器人對環境感知與理解的能力,為突破固定場景任務限制提供了更靈活的解決方案。AI與機器人技術的融合不僅提高了作業精度,更賦予機器人實時決策與持續學習的新能力。這種自我進化特性將推動機器人在社會各領域的深度應用,為人類未來探索開辟新可能。
精選文章: